mBot es un robot educativo creado por Makeblock ideal para el trabajo en aula de la robótica educativa por su robustez, de la programación, porque está basado en la programación por bloques de Scratch y también es compatible con Arduino y de la electrónica. Makeblock es una plataforma de construcción Open Source y sus piezas son compatibles con Lego y los módulos electrónicos pueden funcionar con Arduino y Raspberry Pi.
 Lo primero que vamos a hacer es montar este pequeño robot de 400 gramos de peso y estructura metálica. Esta es la caja que contiene el robot, en nuestro caso un mBot PLUS 2.4G el más adecuado para su uso en el aula. Si optamos por el mBot con bluetooth corremos el riesgo de que si trabajamos con varios robots en el mismo aula éstos se acoplen.
Lo primero que vamos a hacer es montar este pequeño robot de 400 gramos de peso y estructura metálica. Esta es la caja que contiene el robot, en nuestro caso un mBot PLUS 2.4G el más adecuado para su uso en el aula. Si optamos por el mBot con bluetooth corremos el riesgo de que si trabajamos con varios robots en el mismo aula éstos se acoplen.
Junto con el robots vienen varias guías:
- instrucciones de montaje,
- manejo y programación y
- ejercicios prácticos



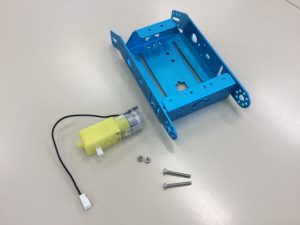
Empezamos a montar nuestro mBot, nos encontramos con el chasis y con el mCore, que es un microcontrolador ATmega238 con 4 puertos con conexiones RJ25 para conectar sensores y dos puertos para conectar motores. También cuenta con un interruptor de encendido, un botón, dos LEDs RGB, dos LEDs normales, un buzzer, un sensor de luminosidad y un sensor de infrarrojos receptor-emisor.
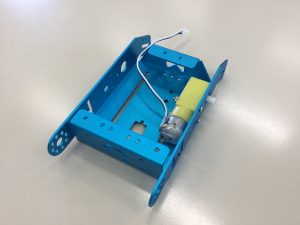
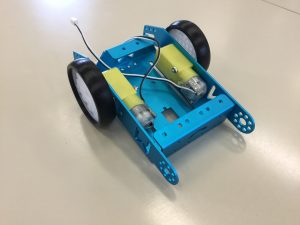
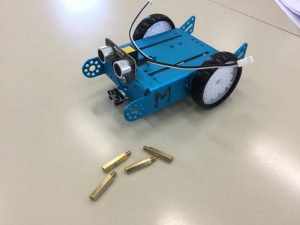
El primer paso es ensamblar los dos motores al chasis con los tornillos M3 y sus correspondientes tuercas:

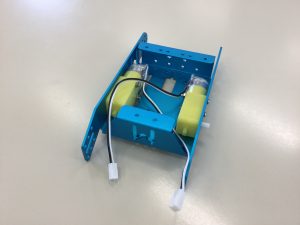
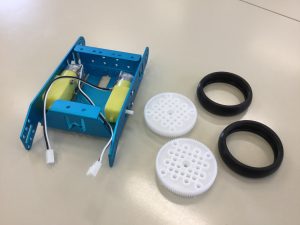
Una vez tenemos los motores añadimos las ruedas a cada motor con tornillos de auto-performación:

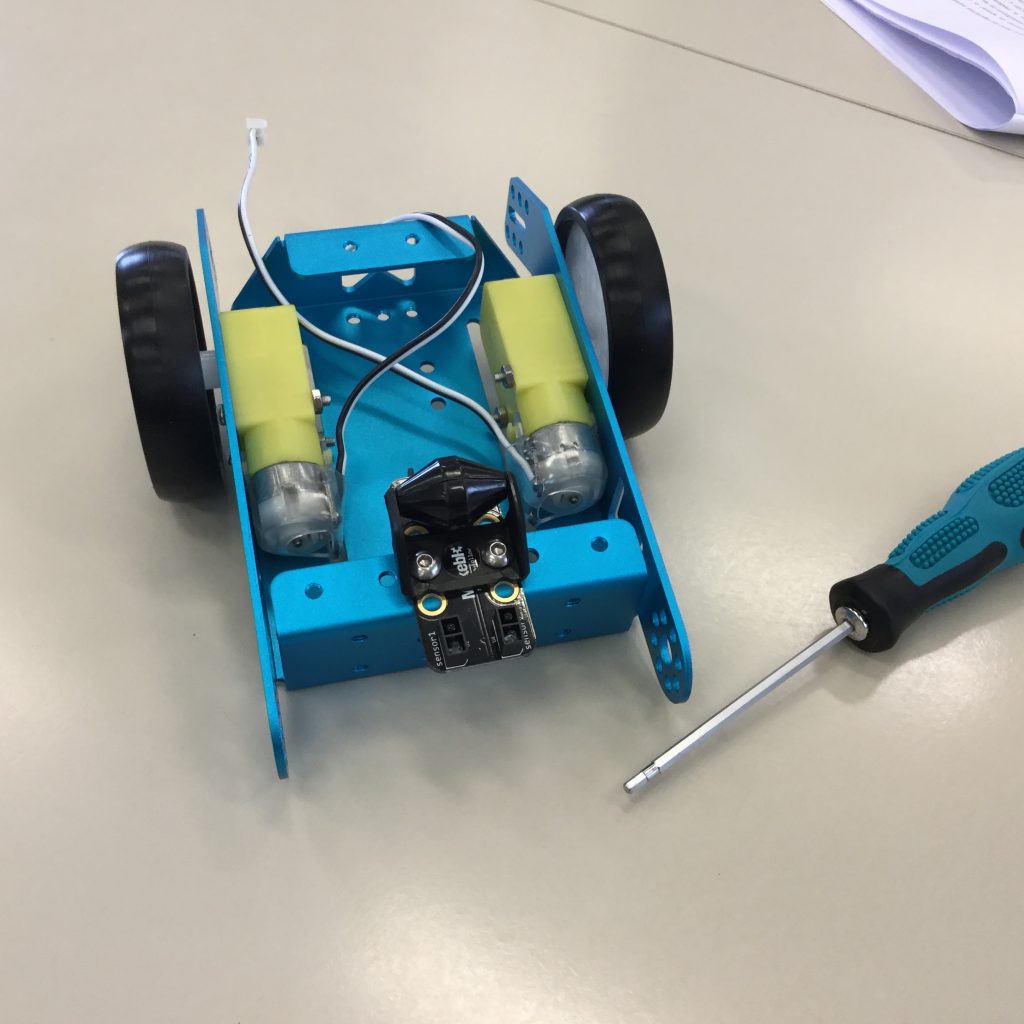
En el mBot el sensor sigue-líneas viene perfectamente anclado al chasis lo que mejora su funcionalidad mucho puesto que no se mueve ni descoloca. Añadimos el sensor sigue-líneas y la mini rueda con dos tornillos y la ayuda del destornillador que viene con el robot. Fijamos ambas piezas en la parte frontal del chasis.
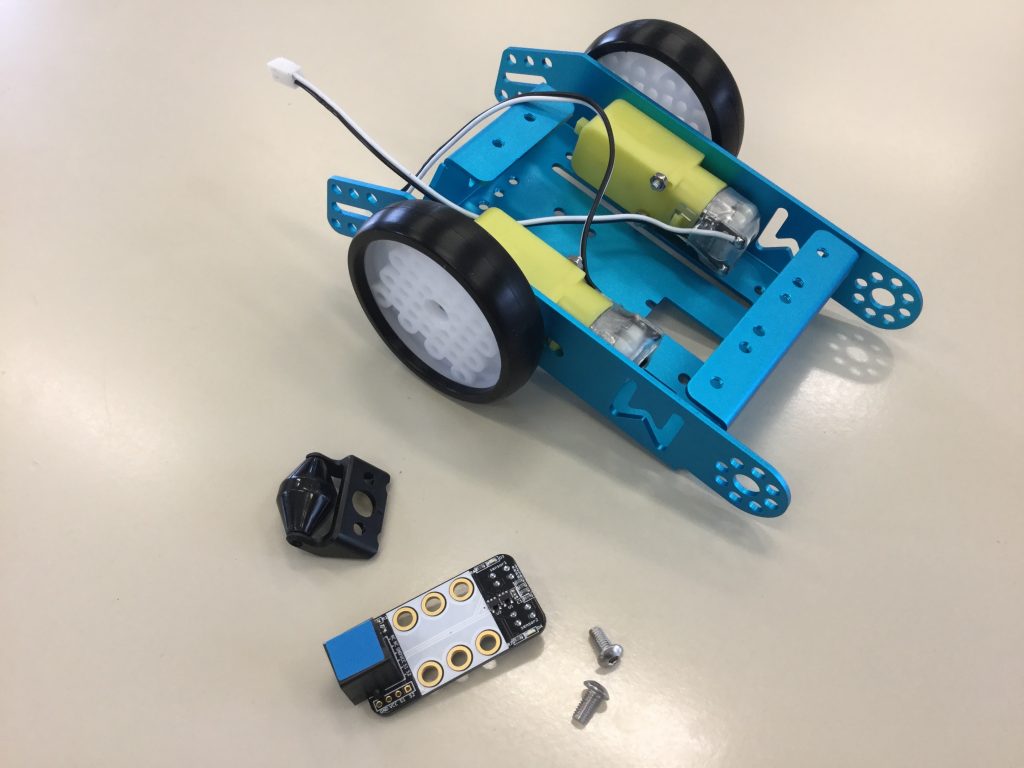
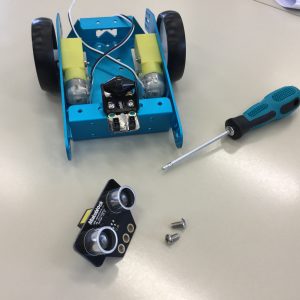
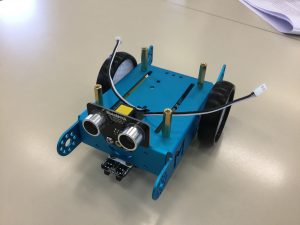
Otro sensor que viene incorporado en el mBot es el sensor ultrasónico que va a permitir que nuestro robot detecte obstáculos. Un problema que suele surgir con este sensor y que al ensamblarlo con tornillos al chasis desaparece, es la dificultad de calibrarlo y de que se mantenga en su lugar, al incorporarlo al chasis obstáculo salvado.

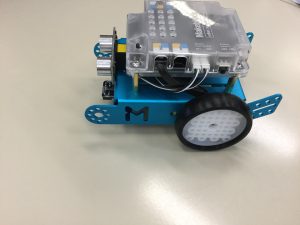
Ya tiene una pinta fantástica, el sensor ultrasónico le da el aspecto de cara a nuestro mBot. Es el momento de sacar los cables de los motores por el agujero que tenemos en el centro del chasis para facilitarnos el trabajo posterior. También utilizamos dos conexiones RJ25 para conectar los dos sensores que hemos instalado hasta ahora al mCore que vamos a proceder a acoplar. Para unir el mCore necesitamos cuatro espárragos de laton que atornillamos al chasis en sus cuatro esquinas.
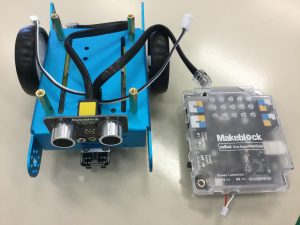
Dejamos un momento el chasis y preparamos el mCore de nuestro robot. Abrimos la caja que lo contiene y con muchísimo cuidado y acoplamos el módulo de Bluetooth o 2.4G, en nuestro caso éste último. Tenemos que ser muy cuidadosos para no dañar el chip. Y volvemos a cerrar la caja que lo protege.




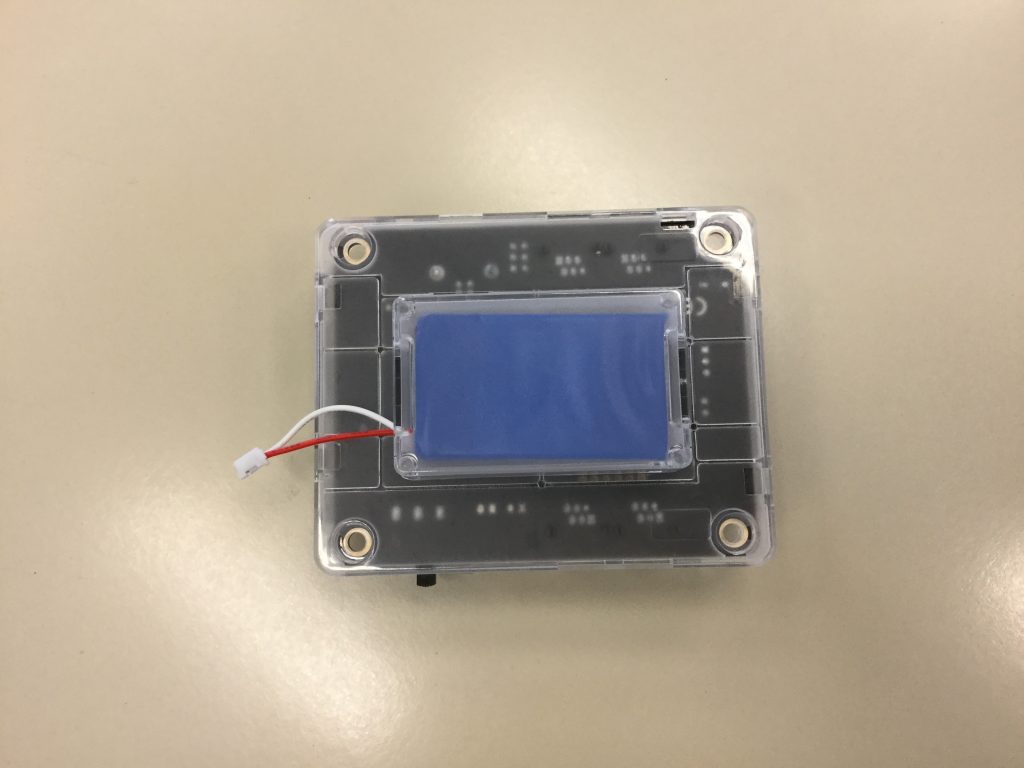
También tenemos que preparar la fuente de energía. Los mBots nos ofrecen la posibilidad de tener una batería de litio o pilas AA. Nosotros hemos optado por la batería de litio que hay que comprar aparte.
La batería de litio viene con una caja que nos va a servir para asegurar la batería al chasis y que no se mueva ni interfiera en el movimiento del robot. Abrimos la caja transparente e insertamos la batería de litio. Sacamos los cables por la ranura y ya la tenemos lista para acoplarla al mCore del robot con unos tornillos M4 de 8 mm.




Si hemos optado por utilizar baterías AA tenemos un soporte para las pilas que en este caso vamos a pegar con un velcro adhesivo el soporte al chasis del robot.
Es el momento de unir el chasis y el mCore para terminar de montar nuestro robot. Tenemos cuidado de que los cables estén bien colocados. Los cables de los robots deben salir por el lateral izquierdo para poder luego conectarlos al mCore, el cable RJ25 que conecta el sensor sigue-líneas debe salir por el lateral izquierdo también, el cable RJ25 que conecta el sensor ultrasónico debe salir por el lateral derecho. Los cables de la batería tienen que salir por la parte trasera. Es importante colocar bien todos los cables porque una vez unimos el mCore al chasis es difícil manipularlos.
Unimos el mCore atornillándolo a los espárragos de latón que tenemos preparados en el chasis.


Para poder empezar a funcionar hay que conectar todos los cables con cuidado de que cada uno vaya en su lugar correspondiente.
- Los cables de los motores se conectan en el lado derecho del chasis en Motor Connector, el motor izquierdo en M1 y el motor derecho en M2.
- El sensor sigue-líneas se conecta por medio de un cable RJ25 al puerto 2 (izquierda).
- El sensor ultrasónico se conecta por medio de un cable RJ25 al puerto 3 (derecha).
- La batería de litio o las pilas AA se conectan a la parte trasera del mCore a Power Connector, 3.7V o 6V
Nuestro mBot está preparado para ser programado y funcionar.
Esta entrada está también disponible en: Euskera